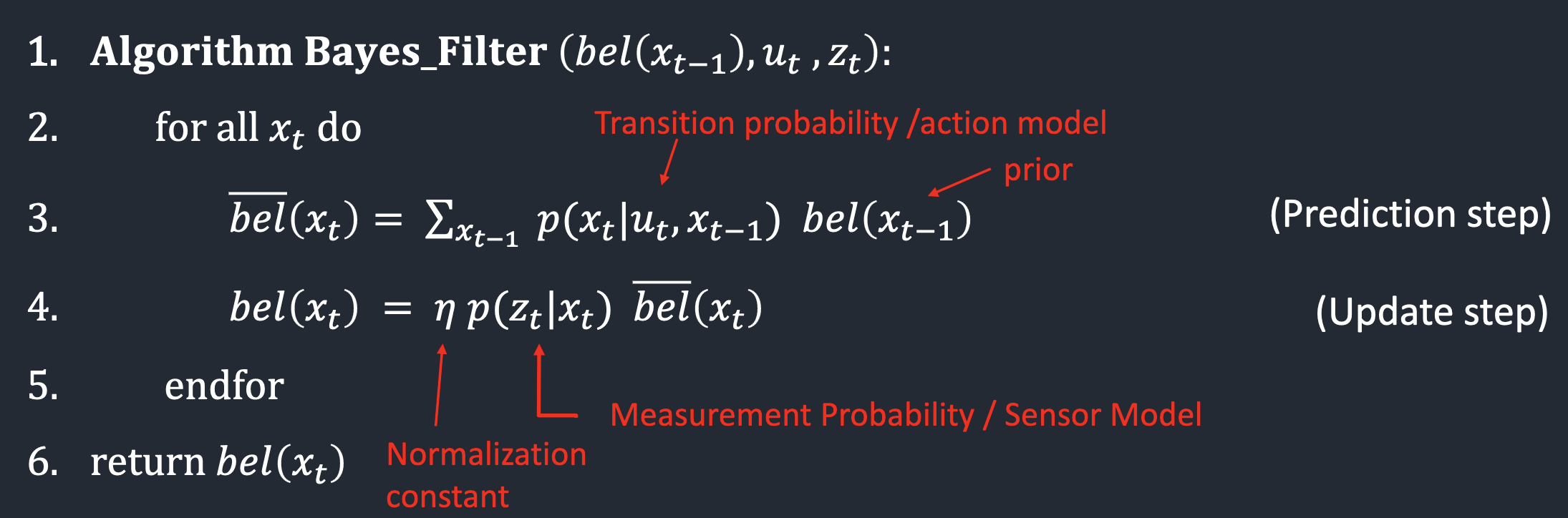
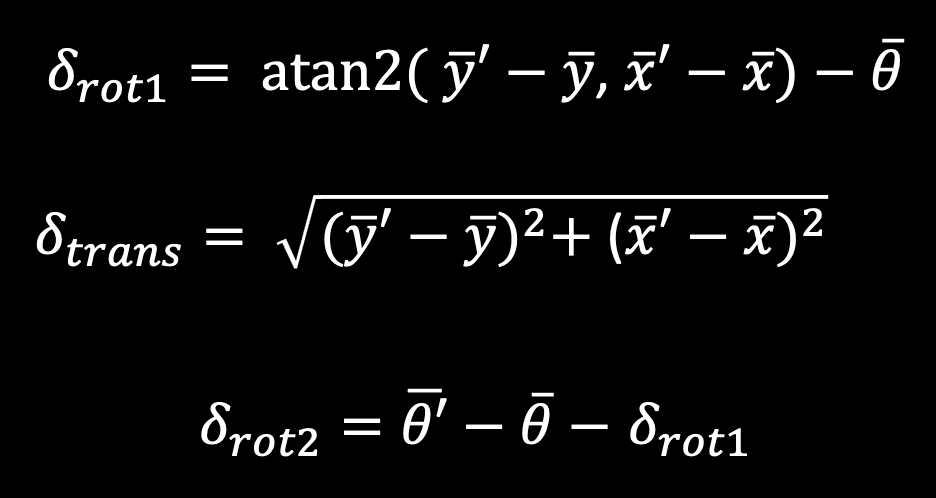
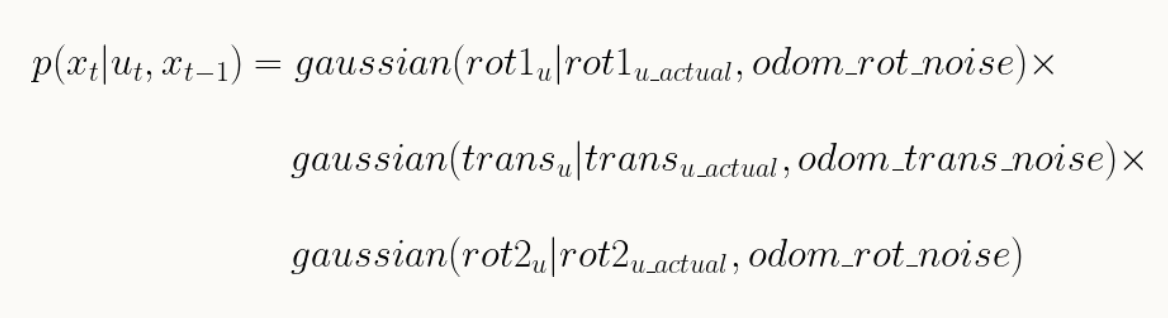
Lab 10: Grid Localization using Bayes Filter
In this lab, I will simulate grid localization using Bayes filter to visualize localization on my robot.
In this lab, I will simulate grid localization using Bayes filter to visualize localization on my robot.