Lab 5: Motors and Open Loop Control
In this lab, I assembled the entire robot! I first drove the motors using dual motor drivers, opened the Force1 RC car and attached my drivers to the car's motors, and then ran various open loop control tests.
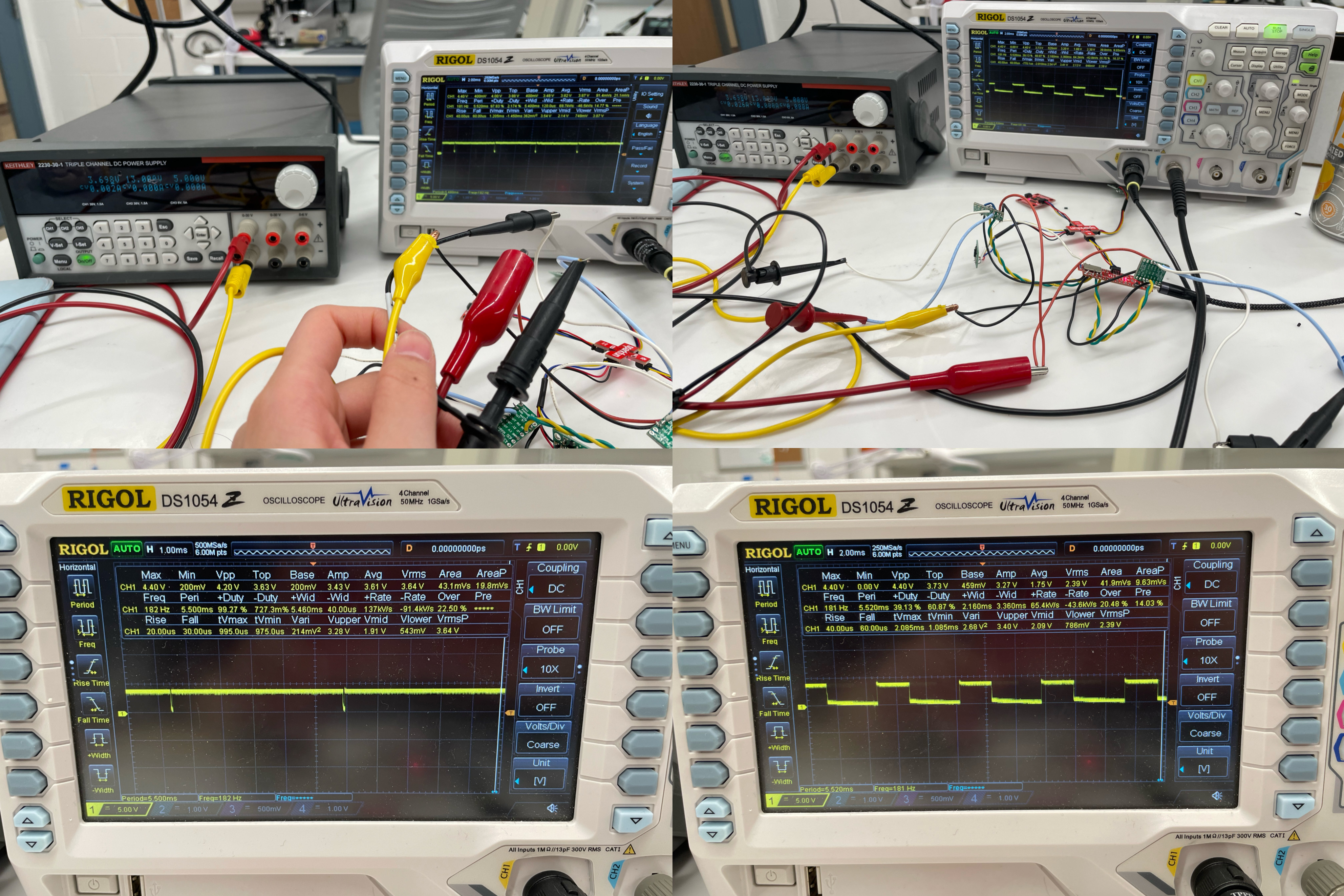
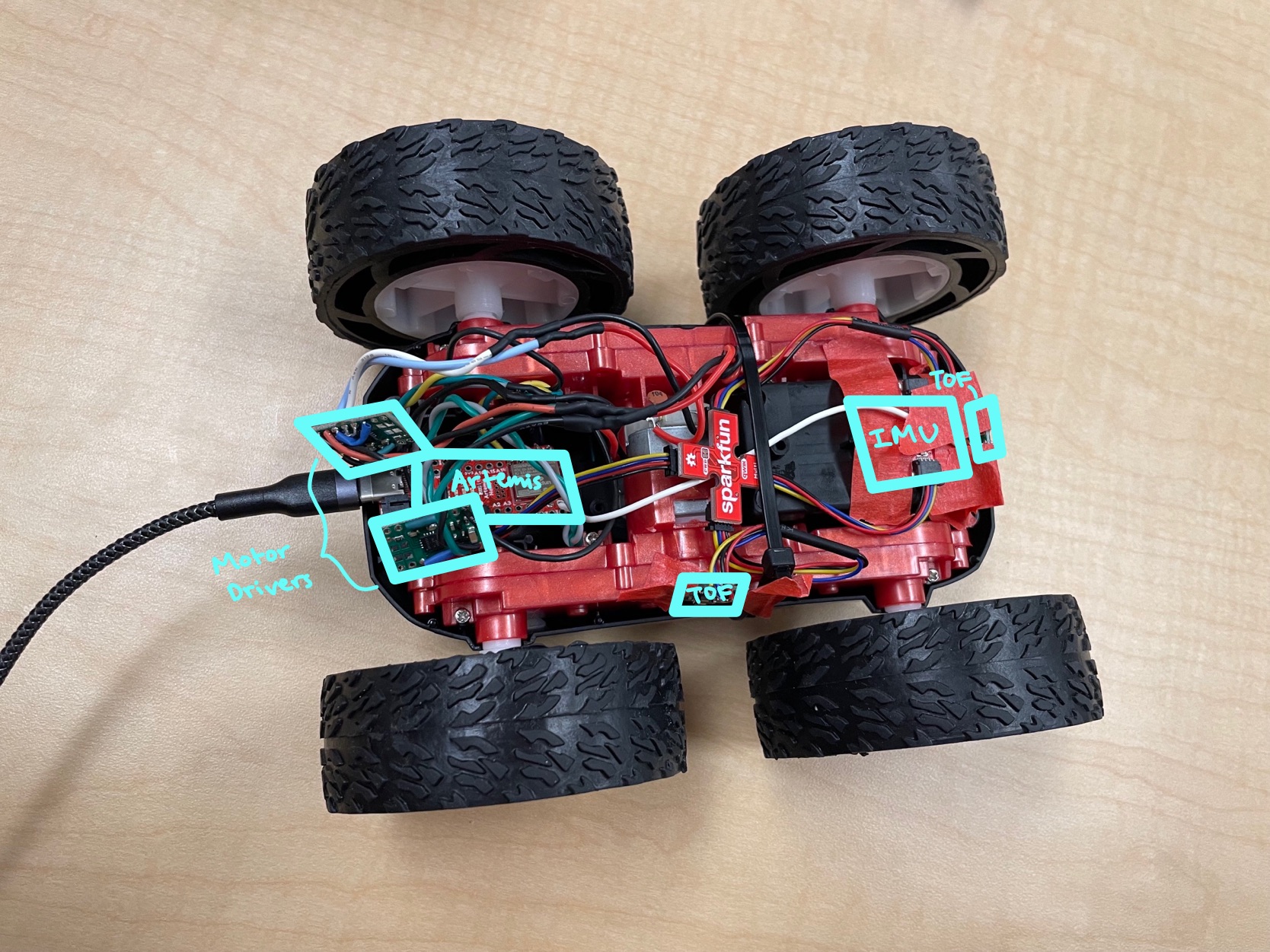
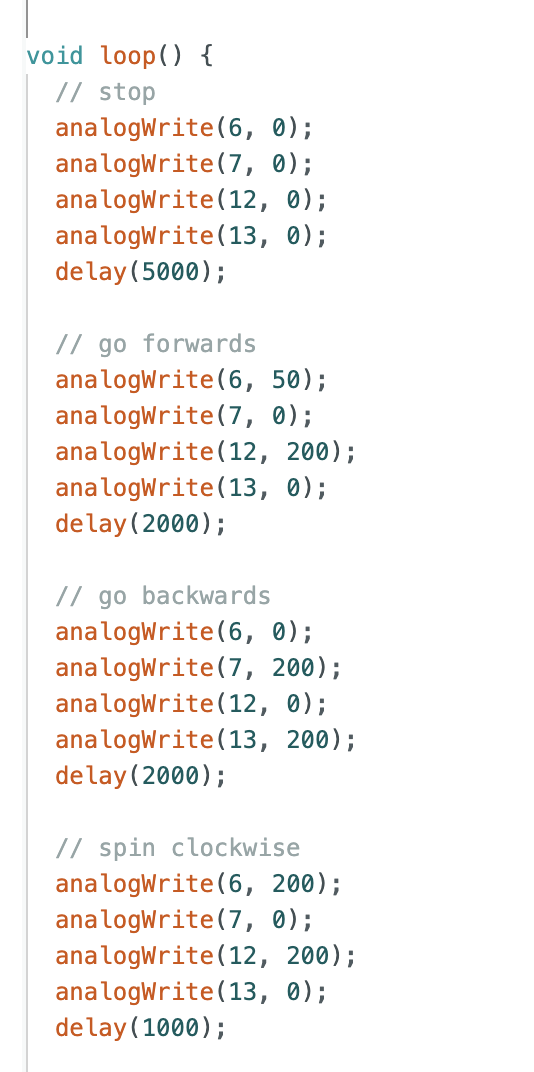
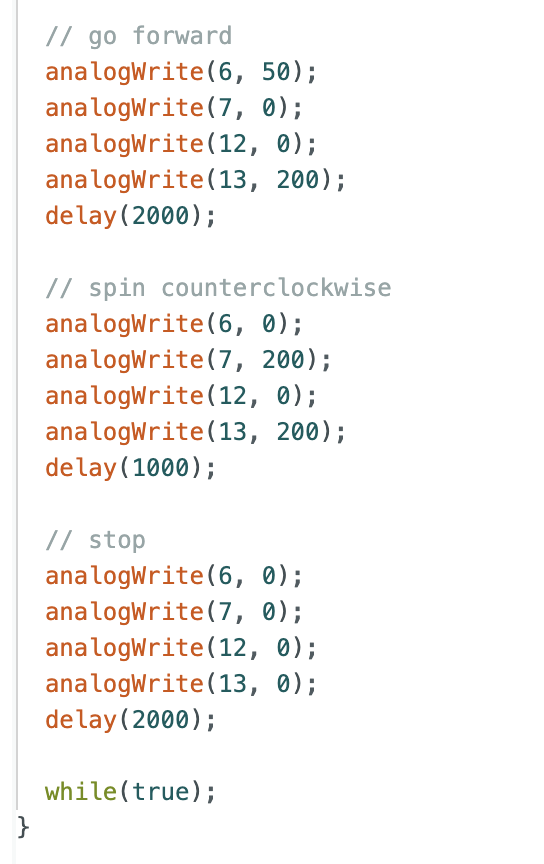
In this lab, I assembled the entire robot! I first drove the motors using dual motor drivers, opened the Force1 RC car and attached my drivers to the car's motors, and then ran various open loop control tests.